
Mach flott den Schrott: Elektronischer Sextant
Elektronischer Sextant
Dieses Projekt entstand im Jahre 2011 als Beitrag zum Bastelwettbewerb "Mach flott den Schrott" der Zeitschrift c't
und ist dabei mit dem
3. Platz in der Kategorie "Originalität" und einen 4. Platz in der Kategorie "Umsetzung"
ausgezeichnet worden.
Im Folgenden ist die Konstruktion des elektronischen Sextanten beschrieben, bei der ich Bestandteile eines alten DIN-A3-Flachbettscanners,
eines Druckers und eines Diskettenlaufwerks recycled habe.
Der optische Sensor des Scanners darf in seiner neuen Verwendung anstatt die Position von Druckerschwärze auf Papier,
die Sonnenhöhe über dem Horizont erfassen. Mit den bekannten Methoden der Astronavigation
kann aus zwei solchen Messungen zu zwei verschiedenen bekannten Uhrzeiten dann die geographische Länge und Breite des Standortes bestimmt werden.
Beitrag zum Bastelwettbewerb "Mach flott den Schrott" der Zeitschrift c't
und ist dabei mit dem
3. Platz in der Kategorie "Originalität" und einen 4. Platz in der Kategorie "Umsetzung"
ausgezeichnet worden.
Im Folgenden ist die Konstruktion des elektronischen Sextanten beschrieben, bei der ich Bestandteile eines alten DIN-A3-Flachbettscanners,
eines Druckers und eines Diskettenlaufwerks recycled habe.
Der optische Sensor des Scanners darf in seiner neuen Verwendung anstatt die Position von Druckerschwärze auf Papier,
die Sonnenhöhe über dem Horizont erfassen. Mit den bekannten Methoden der Astronavigation
kann aus zwei solchen Messungen zu zwei verschiedenen bekannten Uhrzeiten dann die geographische Länge und Breite des Standortes bestimmt werden.

Der elektronische Sextant, gebaut aus Bestandteilen eines alten Scanners, Druckers und Diskettenlaufwerks. Zum Größenvergleich ein Maßkrug.
Kardanische Aufhängung
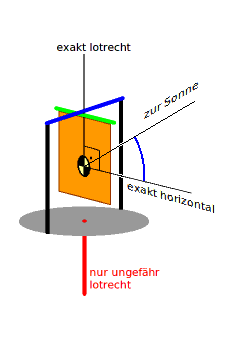
Der Sextant verwendet einen sogenannten künstlichen Horizont, d.h. als Bezugsrichtung zur Messung der Sonnenhöhe wird die Richtung der Schwerkraft verwendet. Damit ist er zwar wegen seiner Empfindlichkeit gegenüber Beschleunigungen nur in Ruhe (an Land) anwendbar, benötigt dafür aber keine freie Sicht zum echten Horizont.Folgende Darstellung veranschaulicht wie der künstliche Horizont mittels kardanischer Aufhängung der Sensor-Platte realisiert ist. Als eine Achse (blau) wurde eine verchromte Stange verwendet. Die Drehbarkeit um die andere Achse (grün) ist durch die Aufhängung an zwei 0.2mm dünnen Phosphorbronzeblechstreifen realisiert.
Die Optik mit Sensor ist auf einer 2mm dicken Stahlplatte montiert. Die gesamte Sensor-Platte hat eine Masse von ca. 400g.
Kardanische Aufhängung des Sextanten.
Rotation um Azimut-Achse
Damit der Sextant nicht manuell zur Sonne ausgerichtet werden muss, kann die Aufhängung um die Azimut-Achse mittels eines Schrittmotors rotiert werden, bis die Sonne in Blickrichtung des Sensors gerät.
Für die Mechanik zur Rotation um die Azimut-Achse wurde eine Achse mit Zahnrad aus dem Papiertransportmechanismus eines Druckers sowie ein Schrittmotor mit passendem Ritzel recycelt.
Rotation um die Azimut-Achse.
Problematisch könnte es höchstens sehr nahe am Äquator werden, wo die Sonnenbahn sehr steil verläuft, d.h. der Azimutwinkel der Sonne sich dort sehr wenig verändert. Für solche Anwendungsorte müsste der Sextant noch mit einem stärker untersetztem Getriebe bzw. Schrittmotor mit kleinerer Schrittweite ausgestattet werden.
Gesamtüberblick über die Elektronik

Gesamtüberblick über die elektronischen Module. Die CCD-Treiber- und AD-Wandler-Elektronik wurde wiederverwendet. Die beiden Mikrocontrollereinheiten und der Schrittmotortreiber sind neu.
Die CCD-Sensoreinheit

Die CCD-Sensoreinheit, mit Objektiv, Zeilensensor, Treiber- und AD-Wandler-Platine.
Die resultierende Winkelauflösung beträgt also ca. 40° / 2500 = 0.016° = 0.96'. Bezogen auf den Ort bedeutet das eine Ungenauigkeit von weniger als eine Seemeile.
Das Objektiv ist ca. 30° nach oben gerichtet. Damit kann die Sonnenhöhe also in einem Bereich von ca. 10° bis 50° gemessen werden. Diese Einschränkung tut nicht weiter weh, da für Höhen niedriger am Horizont ohnehin atmosphärische Effekte (die nur näherungsweise berücksichtigt werden können) die Genauigkeit beeinträchtigen würden und Sonnenhöhen nahe am Maximum auch nicht ideal für die Ortsbestimmung geeignet sind, da sich dort die Höhe über die Zeit kaum ändert, der Fehlereinfluss auf die geographische Länge also relativ hoch ist. Da der CCD-Sensor für den ungeschützten Blick in die Sonne oder auch nur auf den Tageshimmel zu empfindlich ist, wird das Objektiv mit einer Filterfolie, wie sie für SoFi-Brillen o.ä. verwendet wird, bedeckt. Außerdem wird die CCD-Sensor-Halterung von einer Papphülle umgeben um störendes Streulicht fern zu halten (auf den Fotos und Videoclips der Anschaulichkeit wegen nicht vorhanden).

Zur richtigen Beschaltung der alten Elektronik mussten zuerst die Schaltpläne der Treiber- und AD-Wandler-Platine reverse-engineert werden.
Auf der Treiberplatine befinden sich zwei DS0026 Pegelkonverter/Treiber, die die Taktsignale von TTL nach 12V umsetzen.

Die Taktsignale SH, Φ1, Φ2 und RS sowie ein weiteres für den AD-Wandler müssen generiert werden. (Auszug aus dem Datenblatt zum TCD103 von Toshiba)

Die Generierung der Taktsignale übernimmt ein Atmel AVR-Mikrocontroller ATtiny2313, der über SPI mit der Steuereinheit kommuniziert.
Die Steuereinheit

Der Hauptcontroller, ein Atmel AVR ATmega8, kommuniziert mit dem CCD-Controller über SPI, mit dem Schrittmotortreiber über den Parallelport und mit dem PC über serielle Schnittstelle.
PC-Software
Die Steuereinheit des Sextanten kann eigentlich schon direkt von einem Terminal aus mittels einer Handvoll Befehle bedient werden. Zum effizienteren Umgang mit dem Gerät habe ich in Python eine Wrapper-Klasse geschrieben, in der die niederen Befehle gekapselt werden und eine Anwendung mit GUI zur bequemen Bedienung und Darstellung der Messdaten.
Die Anwendung erfasst periodisch alle 2 Sekunden eine Pixelzeile und stellt die aktuellen Intensitätswerte dar (rechter Bereich in Rot und Schwarz). Die Intensitätswerte (Graustufen) wandern als Wasserfalldiagramm nach links. Die Knöpfe dienen der Steuerung des Schrittmotors.
Messungen
Drei Messungen von Sonnendurchgängen. Die vertikale Achse stellt die Pixelpostion dar, die horizontale die Zeitachse. Jeweils zwischen den drei Durchgängen wurde der Sextant um die Azimut-Achse gedreht (helle vertikale Streifen) damit die Sonne wieder neu durch das Sichtfeld wandert.
Eine grobe Abschätzung mittels Linsengleichung 1/f = 1/b + 1/g ergibt, dass die Bildweite um ca. 3-4mm verringert werden muss. Glücklicherweise kann das Objektiv über eine Madenschraube gelockert und dann eingestellt werden. Damit sollten dann Intensitätsverläufe an den Flanken der Sonnenscheibe steiler werden.
Ausblick
Der Sextant als reines Peripheriegerät ist soweit abgeschlossen und einsatzbereit. PC-seitig sind noch folgende Punkte geplant:- Automatische Erkennung der oberen und unteren Intensitätsflanken und Berechnung der Pixelposition des Zentrums der Sonne
- Umrechnung der Pixelposition in Grad über dem Horizont. Dazu müssen Stützwerte bei bekannter Sonnenhöhe gemessen werden und eine Umrechnungsfunktion (Fitkurve) ermittelt werden.
- Umrechnung der Sonnenhöhen und Uhrzeiten der Messungen in geographische Koordinaten.
Making-Of

Messung am lebenden Objekt während der Entwicklung der Software für die CCD-Taktsignalgenerierung.
Zusammenbau des Sextanten.